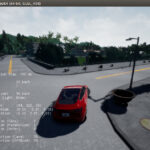
2018-08-23 / 最終更新日時 : 2021-08-03 admin CARLA CARLAのための模倣学習トレーニング CARLAは、自動運転研究のためのオープンソースシミュレーターです。この記事では、CARLAのための模倣学習トレーニングについて紹介します。
2018-08-14 / 最終更新日時 : 2021-08-03 admin CARLA CARLAにおける自動運転のための強化学習 CARLAは、自動運転研究のためのオープンソースシミュレーターです。この記事では、CARLAにおける自動運転のための強化学習を紹介します。
2018-08-06 / 最終更新日時 : 2021-08-03 admin AirSim AirSimにおける自動運転のための深層強化学習 AirSimは、ドローンと自動車のためのオープンソースシミュレーターです。この記事では、AirSimを用いたチュートリアル「Distributed Deep Reinforcement Learning for Autonomous Driving」の中から、分散ではなく1台のWindowsマシンによる深層強化学習を紹介します。
2018-07-29 / 最終更新日時 : 2021-08-03 admin CARLA CARLAにおける自動運転のための模倣学習 CARLAは、自動運転研究のためのオープンソースシミュレーターです。この記事では、CARLAにおける自動運転のための模倣学習を紹介します。
2018-07-22 / 最終更新日時 : 2021-08-03 admin Autoware Dockerを用いたAutowareのセットアップとデモ 自動運転ソフトウェアのAutowareでは、Dockerイメージが提供されており、このDockerイメージを利用することで、Autowareを簡単にインストールできます。この記事では、Dockerを用いてAutowareをセットアップし、デモを実行する方法を紹介します。
2018-07-16 / 最終更新日時 : 2021-08-03 admin AirSim AirSimにおける自動運転のためのエンドツーエンド・ディープラーニング AirSimは、ドローンと自動車のためのオープンソースシミュレーターです。この記事では、AirSimを用いた自動運転のチュートリアル「Autonomous Driving using End-to-End Deep Learning: an AirSim tutorial」を紹介します。
2018-07-08 / 最終更新日時 : 2021-07-27 admin CARLA Dockerを用いた自動運転シミュレーターCARLAの環境構築 CARLAは、自動運転研究のためのオープンソースシミュレーターです。この記事では、Dockerを用いてCARLA環境を構築する方法を紹介します。
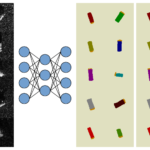
2018-05-30 / 最終更新日時 : 2021-07-27 admin Information E2E SAR ATRのための改善されたCNN 私たちのメンバーは、エンドツーエンドの合成開口レーダー自動目標認識のために、改善された畳み込みニューラルネットワークを提案しました。
2018-02-01 / 最終更新日時 : 2021-07-26 admin Information End-to-End SAR ATRのためのCNN 私たちのメンバーは、エンドツーエンドの合成開口レーダー(SAR)自動目標認識(ATR)のために、新しい畳み込みニューラルネットワーク(CNN)を提案しました。このCNNは、複数クラス・複数目標が存在する任意サイズのSAR画像を入力し、検出された各目標の位置、クラスおよび姿勢を表すSAR ATR画像を出力します。
2017-11-02 / 最終更新日時 : 2021-07-27 admin NVIDIA DIGITS Modified DIGITS Dockerがv6.0.1に対応 Modified DIGITS Dockerがv6.0.1に対応しました。