Vehicle Detection using Darknet YOLOv3 on Jetson Nano
We performed Vehicle Detection using Darknet YOLOv3 and Tiny YOLOv3 environment built on Jetson Nano as shown in the previous article.
Performance of YOLOv3 and Tiny YOLOv3 on the COCO dataset
Performance on the COCO dataset is shown in YOLO: Real-Time Object Detection. The following table shows the performance of YOLOv3 (YOLOv3-416) and Tiny YOLOv3 (YOLOv3-tiny) from the above site.
| Model | Train | Test | mAP | FLOPS |
|---|---|---|---|---|
| YOLOv3-416 | COCO trainval | test-dev | 55.3 | 65.86 Bn |
| YOLOv3-tiny | COCO trainval | test-dev | 33.1 | 5.56 Bn |
The mAP for YOLOv3-416 and YOLOv3-tiny are 55.3 and 33.1 respectively. The mAP of the two models have a difference of 22.2.
Vehicle Detection using Darknet YOLOv3 and Tiny YOLOv3
We performed Vehicle Detection using Darknet YOLOv3 and Tiny YOLOv3 environment built on Jetson Nano. The test video for Vehicle Detection used solidWhiteRight.mp4 of GitHub – udacity/CarND-LaneLines-P1: Lane Finding Project for Self-Driving Car ND.
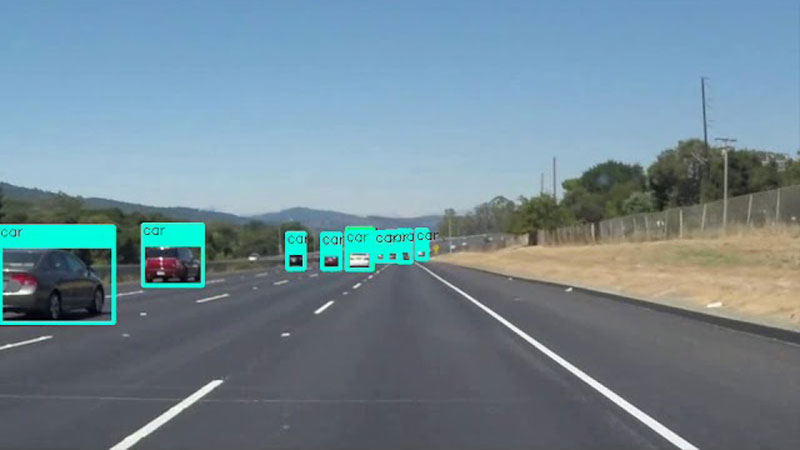
Darknet YOLOv3 (YOLOv3-416)
The video below shows the results of Vehicle Detection using Darknet YOLOV3 on Jetson Nano.
It can be seen that YOLOv3 detects distant vehicles. However, the FPS at this time was about 2.
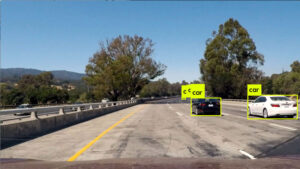
Darknet Tiny YOLOv3 (YOLOv3-tiny)
The video below shows the results of Vehicle Detection using Darknet Tiny YOLOv3 on Jetson Nano.
The FPS at this time was about 16. However, it can be seen that Tiny YOLOv3 has not detected distant vehicles, that is, small objects. The difference between the mAP of the two models appears to be reflected in the small object detection performance.
Summary
We performed Vehicle Detection using Darknet YOLOv3 and Tiny YOLOv3 environment built on Jetson Nano as shown in the previous article.
Darknet YOLOv3 detects a distant vehicle, but the processing speed (FPS: about 2) is insufficient. In the case of Darknet Tiny YOLOv3, processing speed (FPS: about 16) is good, but detection of a distant vehicle seems difficult.